The following is a complete list of my scholarly publications, which touch on aerial robotics, deep learning and computer vision, among other things.
For more information, visit my Google Scholar page
Nitin J. Sanket*, Chahat Deep Singh*, Cornelia Fermuller, Yiannis Aloimonos, Sci. Robot. 8, eadd5139, 2023.
* Equal Contribution
Cover of Science Robotics Journal, August 2023.
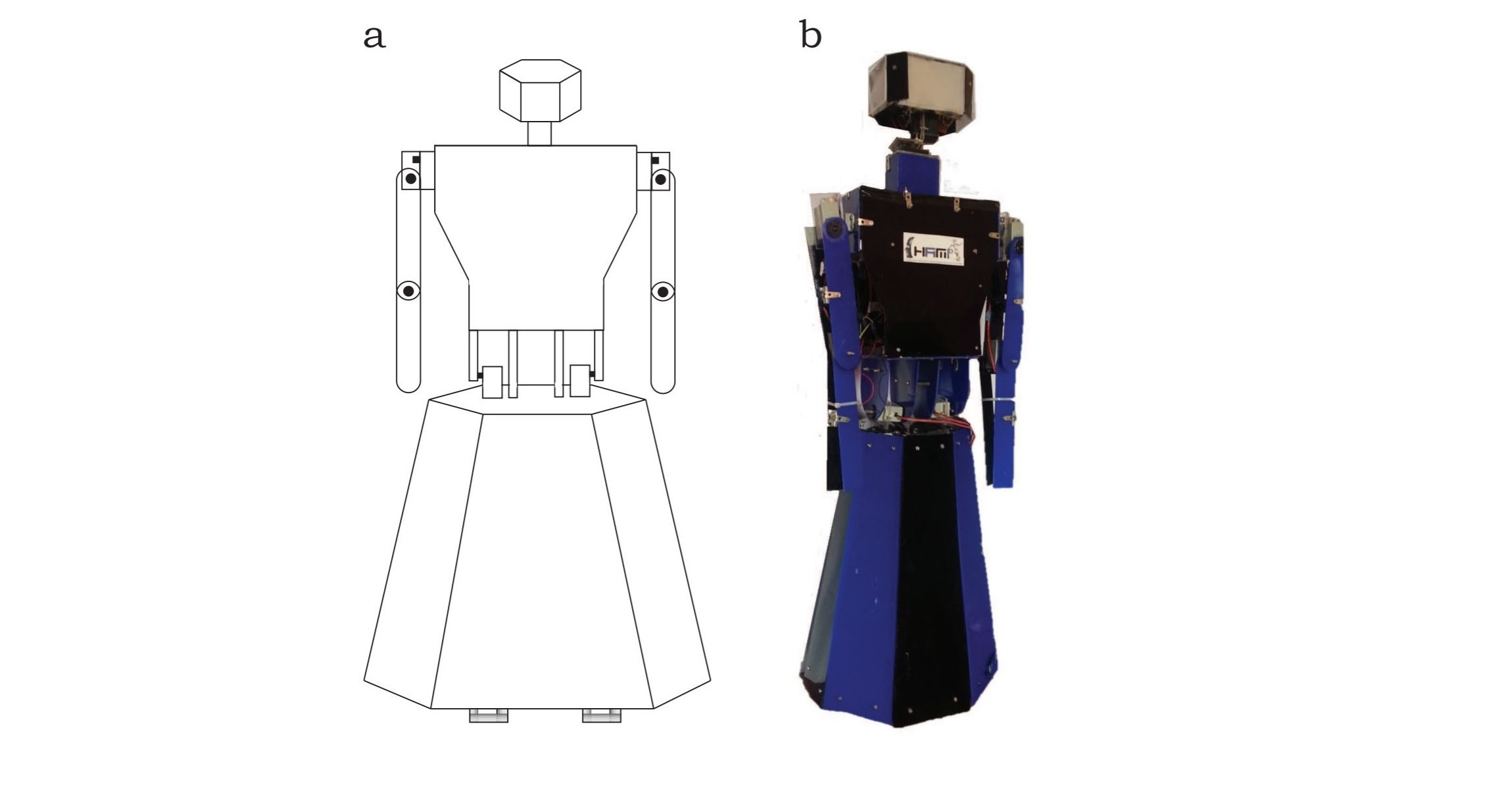
Yianni Karabatis, Xiaomin Lin, Nitin J. Sanket, Michail G. Lagoudakis, Yiannis Aloimonos, IEEE International Conference on Intelligent Robots and Systems (IROS), 2023.
Chahat Deep Singh, Riya Kumari, Cornelia Fermuller, Nitin J. Sanket, Yiannis Aloimonos, IEEE International Conference on Robotics and Automation (ICRA), 2023.
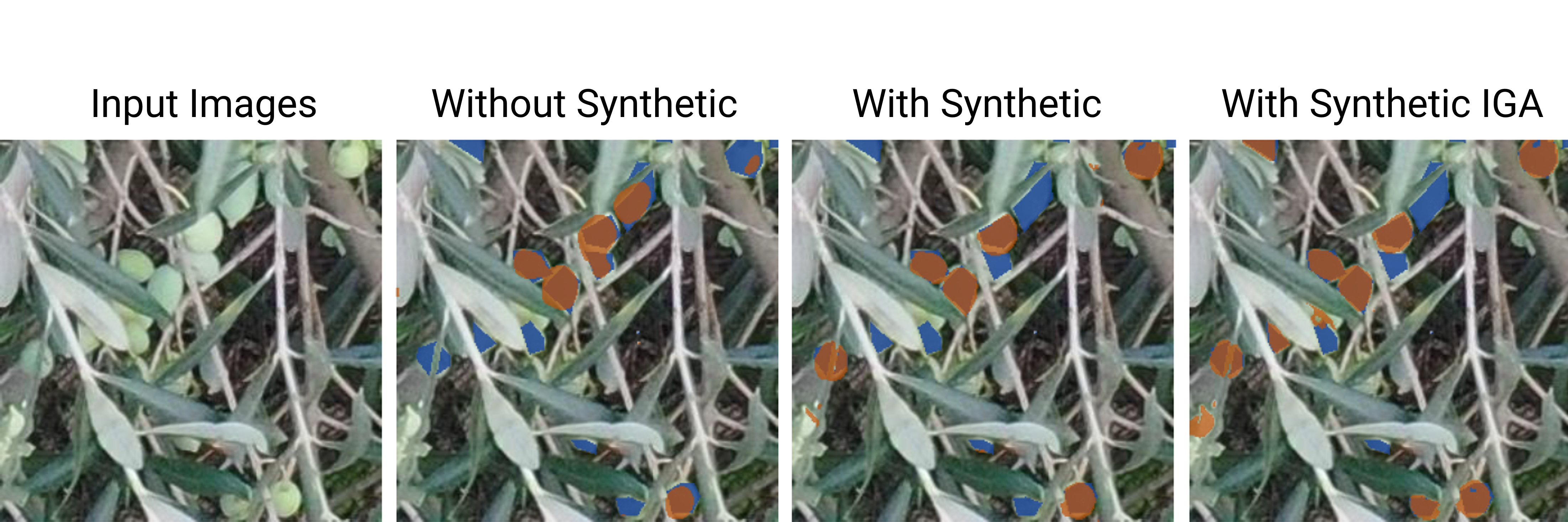
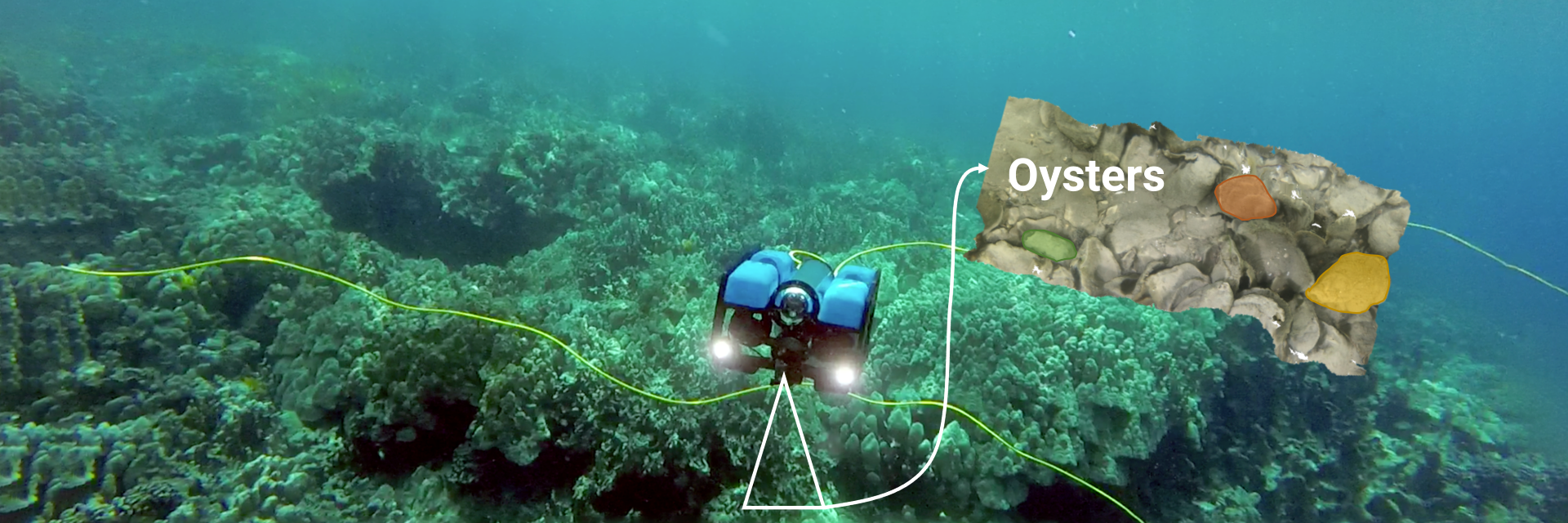
Xiaomin Lin, Nitin J. Sanket, Nare Karapetyan, Cornelia Fermuller, Yiannis Aloimonos, IEEE International Conference on Robotics and Automation (ICRA), 2023.
Levi Burner, Nitin J. Sanket, Cornelia Fermuller, Yiannis Aloimonos, IEEE International Conference on Robotics and Automation (ICRA), 2023.
Chethan M. Parameshwara, Gokul Hari, Cornelia Fermuller, Nitin J. Sanket, Yiannis Aloimonos, IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022.
Kanishka Ganguly, Pavan Mantripragada, Chethan M. Parameshwara, Cornelia Fermuller, Nitin J. Sanket, Yiannis Aloimonos, Frontiers in Robotics and AI,, vol. 9, 2022.

Kanishka Ganguly, Behzad Sadrfaridpour, Pavan Mantripragada, Nitin J. Sanket, Cornelia Fermuller, Yiannis Aloimonos, arXiv Preprint:2011.00712, 2022.
Nitin J. Sanket, Doctoral dissertation, 2021.
Awarded the Larry S. Davis Award for Best Computer Science PhD Thesis at University of Maryland, 2021. News Article
Awarded the MDPI Drones 2021 PhD Thesis Award for a highly anticipated academic thesis that shows great potential, 2021. News Article





Nitin J. Sanket, Chahat Deep Singh, Chethan M. Parameshwara, Cornelia Fermuller, Guido C.H.E. de Croon, Yiannis Aloimonos, Robotics Science and Systems (RSS), 2021.
Nitin J. Sanket*, Chahat Deep Singh*, Cornelia Fermuller, Yiannis Aloimonos, IEEE International Conference on Intelligent Robots and Systems (IROS), 2021.
* Equal Contribution

Chethan M. Parameshwara*, Simin Li*, Cornelia Fermuller, Nitin J. Sanket, Matthew S. Evanusa, Yiannis Aloimonos, IEEE International Conference on Intelligent Robots and Systems (IROS), 2021.
* Equal Contribution
Nitin J. Sanket, Chahat Deep Singh, Varun Asthana, Cornelia Fermuller, Yiannis Aloimonos, IEEE International Conference on Robotics and Automation (ICRA) , 2021.


Nitin J. Sanket, Chahat Deep Singh, Cornelia Fermuller, Yiannis Aloimonos, Electronics Letters, 2021.
Chethan M. Parameshwara, Nitin J. Sanket, Chahat Deep Singh, Cornelia Fermuller, Yiannis Aloimonos, IEEE International Conference on Robotics and Automation (ICRA), 2021.
Nitin J. Sanket*, Chethan M. Parameshwara*, Chahat Deep Singh, Ashwin V. Kuruttukulam, Cornelia Fermuller, Davide Scaramuzza, Yiannis Aloimonos, IEEE International Confernce on Robotics and Automation, Paris, 2020.
* Equal Contribution

Nitin J. Sanket*, Huai-Jen Liang*, Cornelia Fermuller, Yiannis Aloimonos, IEEE Transactions on Automation Science and Engineering, 2019.
* Equal Contribution
Awarded the Brin Family Prize, 2018. News Article
Nitin J. Sanket*, Chahat Deep Singh*, Kanishka Ganguly, Cornelia Fermuller, Yiannis Aloimonos, IEEE Robotics and Automation Letters, 2018.
* Equal Contribution
Awarded the Brin Family Prize, 2018. News Article



 and many more
and many more

Bernd Pfrommer, Nitin J. Sanket, Kostas Daniilidis, Jonas Cleveland, IEEE International Conference on Robotics and Automation, 2017.
Nitin J. Sanket, Vyshak A. V., K. Manikantan, S. Ramachandran, IEEE International Conference on Science Engineering and Management Research, 2014.
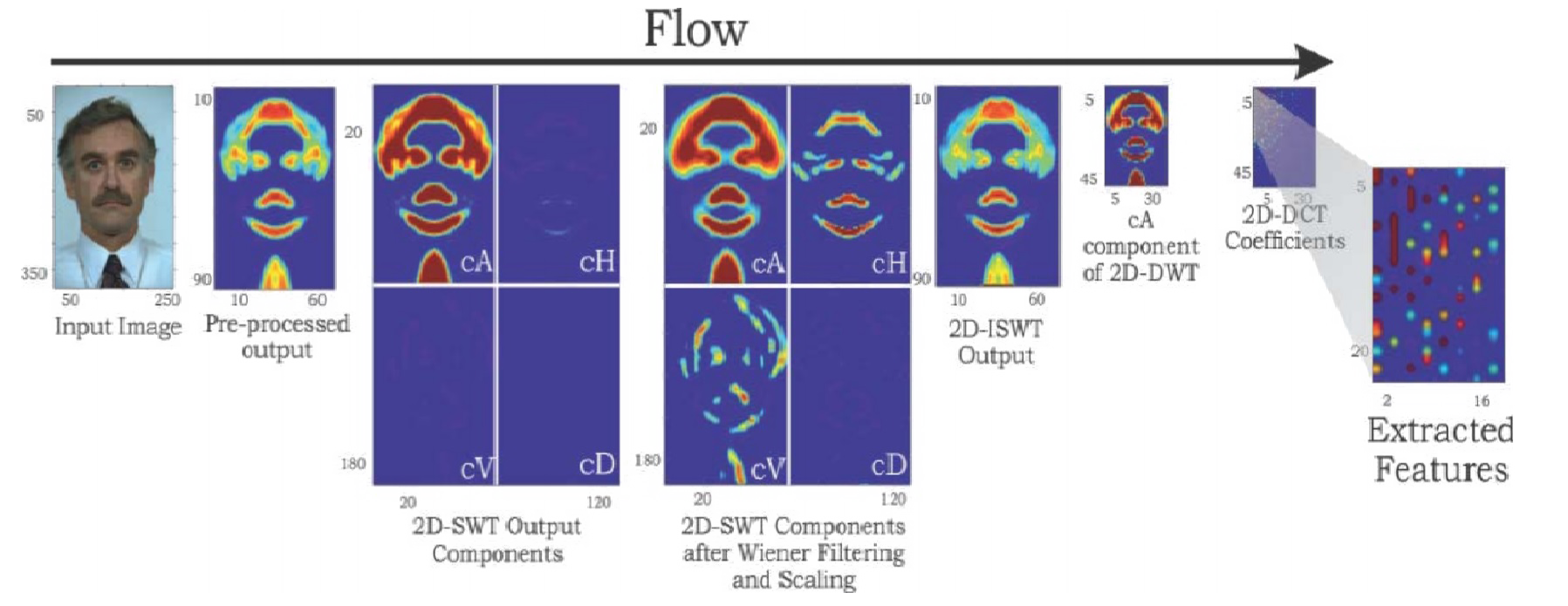
Nitin J. Sanket, K. Manikantan, S. Ramachandran, IEEE National Conference on Computer Vision, Pattern Recognition, Image Processing and Graphics, 2013.
B. Chandan, Chetan Sadhu, Madan Ravi Ganesh, Nitin J. Sanket, IEEE International Conference on Advances in Technology and Engineering, 2013.

Nitin J. Sanket, Chetan Sadhu, Harsha B., Abhiram M. H., Madhu G., IEEE International Conference on Control, Automation, Robotics and Embedded Systems, 2013.